









Technical Hints
Our Modifikations of
Constructions and Programs in
LEGO®-MINDSTORMS EDUCATION EV3
We create modifications of constructions, which
are proposed by LEGO® and invent - mostly
simple - programs or modify given programs.
Especially at start we avoid complex structures,
like ARRAYS. For the first 6 months it seems to be
sufficiently challenging, to use variables for
dynamic adaptation of speed.
We use the Math-Block for PLUS and MINUS.
Max.- / min.-velocity we set by LOGIC-Block.
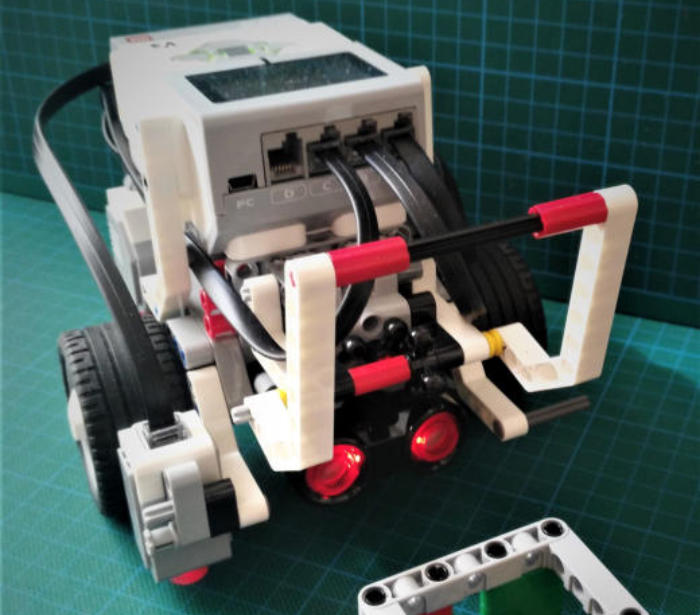
IRE Vehicle:
Explanation of modifications at Robot-Car
Coloursensor aside Ultrasonicsensor, near axle, 10mm above ground.
Rubber-Rings on wheels increase precision of navigation.
Videos at Robot-Car
- Linefollower simple / Linefollower complex
- Cruiser increasing velocity / decreasing velocity
- Driverless traffic with Distance keeping follower
- Driverless post/box delivering car with Colourshifter
- Autonomous traffic management at Traffic Light
Car goes with preset velocity; coloursensor recognizes RED; car stops; coloursensor
recognizes YELLOW; car makes starting sound; Coloursensor recognizes GREEN; Loop…
IRE Sorter:
Explanation of modifications at Coloursorter
Coloursensor dircetly at extruder on the end of the ramp.
White paper on the ramp avoids fail-recognition of construction-parts instead bricks.
No ARRAY necessary.
Each brick is recognized at the extruder and transported to the destination container.
After each deliverance the ramp goes back to start-position.
Video at Coloursorter
- Coloured bricks are sorted with verbal comments and
display-messages
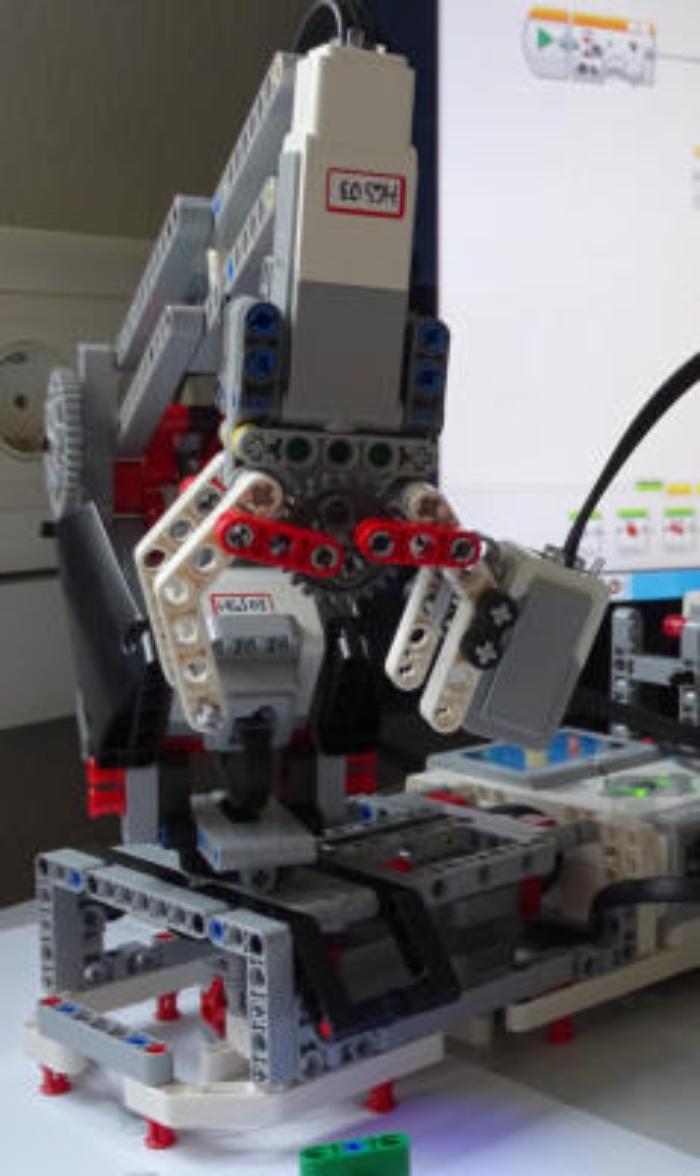
IRE Arm:
Explanation of modifications at Robotarm
Coloursensor directly at gripper.
No ARRAY necessary.
Each brick is recognized at the gripper.
The arm turns over the brick, goes down, closes the gripper and lifts the brick.
The arm turns to the destination-place, goes down and opens the gripper.
The arm goes up and turns back to start-position.
Videos at Robotarm
- Recognize colour, getting position, shift block
Connected Projects and Programs are to be started on the
following page.
LEGO®-SOFTWARE by LabVIEW® is necessary for checking
the programs.
Here our Hints for Download of LEGO®-Mindstorms-EV3-
SOFTWARE.

ICT+ROBOTICs+ETHICs
Choice of Educational Material and Subjects
in Non Formal Learning Environment (elective subjects and courses)
related to the level of intellectual development of students
Technische Hinweise
Modifikationen von
Konstruktionen und Programmen in
LEGO®-MINDSTORMS EDUCATION EV3
Wir modifizieren die von LEGO® vorgeschlagenen
Konstruktionen und schreiben - meist einfachere -
Programme oder modifizieren gegebene Programme.
Zunächst verzichten wir auf komplexe Blöcke wie z. B.
ARRAYs. Es genügen uns für ein Halbjahrescurriculum
als höchste Anforderung Variablenübergaben zur
dynamischen Veränderung von Geschwindigkeiten.
Wir nutzen den Matheblock für Subtraktion/ Addition.
Max.-/Min.-geschwindigkeit setzen wir per Logikblock.
IRE Vehicle:
Erläuterung der Modifikationen zum Roboterfahrzeug
Farbsensor neben dem Utraschallsensor, möglichst zentral in Achsennähe, 10mm über Grund.
Gummiringe auf den Reifen erhöhen Lenkungspräzision.
Videosequenzen zum Roboterfahrzeug
- Linienfolger einfach / Linienfolger schwierig
- Tempomat schneller / langsamer
- Autonomes Fahren mit Distanzhalter
- Paketzustellung mit Farbtransporter
- Autonome Verkehrslenkung an der Ampel
Auto fährt mit voreingestelltem Tempo; Farbsensor misst ROT; Auto stoppt; Farbsensor
misst GELB; Auto macht Startgeräusch; Farbsensor misst GRÜN; Programmschleife…
IRE Sorter:
Erläuterung der Modifikationen zum Sortier-Roboter
Farbsensor direkt am Auswerfer der Rampe.
Weißes Papier auf der Rampe vermeidet Fehlwahrnehmung der Bauteilfarbe statt Steinfarbe.
Kein ARRAY nötig.
Jeder Stein wird am Auswerfer erkannt und dann zum Zielbehälter transportiert.
Nach jeder Auslieferung fährt die Rampe zurück in die Ausgangsposition.
Videosequenz zum Farbsortierer
- Farbsteine sortieren mit Kommentaren und Displaynutzung
IRE Arm:
Erläuterung der Modifikationen zum Roboterarm mit Greifer
Farbsensor direkt am Geifer des Arms.
Kein ARRAY nötig.
Jeder Stein wird am Greifer erkannt.
Der Arm schwenkt über den Stein, senkt sich, greift zu und hebt an.
Dann schwenkt der Arm zum Zielort, senkt sich und öffnet den Greifer.
Dann hebt sich der Arm und schwenkt in die Ausgangsposition zurück.
Videosequenz zum Roboterarm mit Greifer
- Farbe erkennen, Greifer positionieren, Block umsetzen
Die zugehörigen Projekte und Programme stehen auf der
Folgeseite bereit.
Es ist die LEGO®-SOFTWARE von LabVIEW® nötig, um sich die
Programme anzusehen.
Hier unsere Hinweise zum Download der LEGO®-Mindstorms-
EV3-SOFTWARE.


Holstentor-
Gemeinschaftsschule
mit Ganztagsangebot
2023 04 03 1622
ICT+ROBOTICs+ETHICs
Inhalte, Methoden, Systeme, Materialien
in nonformaler Lernumgebung (frei wählbare AGn oder Kurse)
differenziert nach Entwicklungsstand der SchülerInnen
Szkoły Okrętowe i Techniczne











- AM Arrow Robot School
- AM Nitro 01 Colour Sorter
- AM Nitro 02 Corona Fighter
- AM Nitro 03 Autonomous Bus
- AM SoLe Obstacle
- AM Legorian 01 RoboDraw
- AM Legorian 02 Stairclimber
- AM Legorian 03 GyroBoy
- AM Legorian 04 Software
- AM Legorian 05 Workshop
- AM Thunderbird MAC OS
- AM Zorro Dance
- AM LiMa PullChallenge
- AM LiWa 01 Remote Robot
- AM Shower 01 DedicTrace
- AM Shower 02 Trace Follow
- AM Shower 03 Remote
- AM Shower 04 Remote Grip
- AM Shower 05 Camera Remote


- Just Unboxing ore more?
- Assembling a Vehicle
- Program Drive
- Program Dance
- Program Traffic Light
- Program WelcomeParadeFun
- Program Fan
- ERASMUS+ LABEL SCHOOL ENTRANCE
- Paper Tasks and more
- Program LineFollower
- Preparation Meeting Gdansk PL
- Twinspace cancelled but...
- Keep on Running
- Miniatur Wunderland
- Construction Colour Sorter
- Programming Colour Sorter
- Modifications
- Lifter Constructions
- General Feedback
- Remote Control
- eTwin Check
- Video Conferences
- Prep-Meeting
- Hybrid-Session 01 SKYPE
- Hybrid-Session 02 Gyro
- Hybrid-Session 03 OX
- Hybrid-Session 04 Climb
- Hybrid-Session 05 Parcours
- Hybrid-Session 06 ColourTrace
- Hybrid-Session 07 ScrachMistake
- Home-Session 01 Ethics
- Home-Session 02 About Robotic
- Home-Session 03 Feedback
- Home-Session 04 BigBlueButton
- Home-Session 05 EV3 Home
- Home-Session 06 EV3 Classroom
- Individual Sessions Micro:Bit
- Home-Session 07 PullTest
- Home-Session 08 LabView vs Classroom
- Home-Session 09 WarRobot
- Home-Session 10 -12 TRACK3R




- Save the Project!
- Teams Online 01 eTwin vs SKYPE
- Teams Online 02 Schedule
- Teams Online 03 Lockdown
- Teams Online 04 Future
- Teams Online 05 Equipment
- Teams Online 06 TraficLight
- Teams Online 07 OpenRoberta
- Teams Online 08 Applications
- Teams Online 09 SocialSciences
- Teams Online 10/11/12/13/14
- Teams Online 15/16 Organization
- Teams Online 17/18/19 Alternatives
- Teams Online 20 Scratch
- Teams Online 21 Ethics
- Teams Online 22/23/24 25/26 Lock
- Teams Online 27 Other Software
- Teams Online 28 Assocoated Sciences
- Teams Online 29 Pandemic
- Teams Online 30 Choice of Software
- Teams Online 31 Robot Cooperation
- Teams Online 32 WLAN
- Teams Online 33 micro:rover
- Teams Online 34/35/36 Array?
- Teams Online 37/38 About Robototics









